服务咨询电话
服务咨询电话

发表于:2019-07-30
作者:科翔信息
浏览 93 次
申请号:
CN201410211307.6
申请日:
2014.05.19
应用领域:
可以用作星球探测、物资运载和军事侦察等领域。
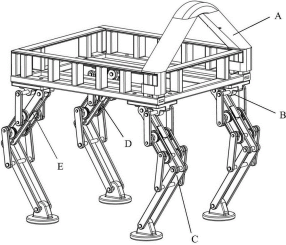
项目简介:
单动力腿机构四足步行机器人,包括运载架(A)、b 至 e 组腿机构(B、C、D、E),其中单组腿机构仅需要一个驱动电机,电机整周回转实现机构的步行移动。通过调整上下曲柄杆件相位差,即b 至 e 第四杆(B-4、C-4、D-4、E-4),可以完成对足端轨迹的调整,改变四足步行机器人的抬腿高度和跨步距离,提升地面通过性能。
技术优势:
本发明专利提出一种单动力腿机构四足步行机器人,单个腿以多连杆机构联动代替多关节电机驱动,减少驱动电机数目,成本低廉,简化控制算法,提升系统可靠性。同时该步行机器人通过调节腿部曲柄杆件相位,调整足端轨迹实现抬腿高度和跨步距离的改变,改善了单自由度腿部机构的局限性,提升该类步行机构的地面通过性和应用范围。
(以上资讯来源于网络,如有侵权,请联系管理员删除。)
合肥科翔信息技术服务有限责任公司 版权所有 免责声明
地址:安徽省合肥市高新区天元路软件园1号楼210-212室
电话:180-1954-5300 QQ:2501649871
COPYRIGHT © 合肥科翔信息技术服务有限责任公司 ALL RIGHTS RESERVED. 皖ICP备2023003016号-1
技术支持:明图网络