服务咨询电话
服务咨询电话

发表于:2019-08-05
作者:科翔信息
浏览 101 次
申请号:
CN201310487588.3
申请日:
2013.10.17
应用领域:
该装置可用于军事领域中勘察特殊地形,执行特种任务;民用领域中用做娱乐设施等。
项目简介:
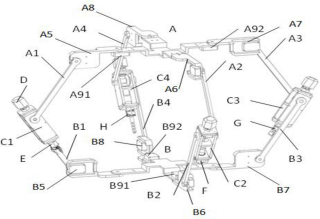
多操作模式四足机器人,包括上、下组件(A、B)、第一至第四中杆组件(C1、C2、C3、C4)和第一至第五功能扩展组件(D、E、F、G、H)。第一至第四中杆组件(C1、C2、C3、C4) 的两个侧部均设有传动轴,一端为方形轴端,另一端为圆形轴端;上组件的第一至第四上连杆(A1、A2、
A3、A4)分别依次活动连接在传动轴的圆形轴端;下组件(B)的第一至第四下连杆(B1、B2、B3、B4)分别依次固定连接在传动轴的方形轴端。第一至第四中杆组件(C1、C2、C3、C4)的前后端均分别设有前后盖板,前后盖板均可以和功能扩展组件进行对接。通过选择不同的功能扩展组件,可以实现机器人不同的操作模式。
技术优势:
提出一种由上下组件以及四个可以添加不同操作工具的中杆组件组成的四足机器人,能够集成变形、折叠、步行等多种运动模式,使得机器人的移动能力大大提高,并且集成多种操作模式,提高机器人操作能力性。
(以上资讯来源于网络,如有侵权,请联系管理员删除。)
合肥科翔信息技术服务有限责任公司 版权所有 免责声明
地址:安徽省合肥市高新区天元路软件园1号楼210-212室
电话:180-1954-5300 QQ:2501649871
COPYRIGHT © 合肥科翔信息技术服务有限责任公司 ALL RIGHTS RESERVED. 皖ICP备2023003016号-1
技术支持:明图网络