服务咨询电话
服务咨询电话

发表于:2019-08-16
作者:科翔信息
浏览 89 次
申请号:
CN201310311125.1
申请日:
2013.07.23
应用领域:
自动化探测领域。
项目简介:
双模式移动机构包括上、下组件,上组 件设有第一至第八连接杆,下组件设有第九 至第十六连接杆;所有连接杆均设有半圆槽, 第四、七连接杆另设有螺纹孔,第十一、十 二、十三、十四连接杆设有电机孔;第一、二连接杆上的半圆槽组成的通孔与第九、十 连接杆上的半圆槽组成的通孔形成转动副; 第三、四连接杆上的半圆槽组成的通孔与第 十一、十二连接杆上的半圆槽组成的通孔通 过电机连接;第五、六连接杆上的半圆槽组 成的通孔与第十五、十六连接杆上的半圆槽组成的通孔形成转动副;第七、八连接杆上的半圆槽组成的通孔与第十三、十四连接杆上的半圆槽组成的通孔通过电机连接;该机构可以实现步行与滚动的移 动功能。
动功能。
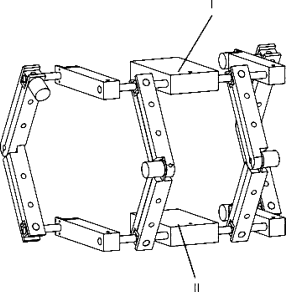
技术优势:
机构变形能力强,灵活度高,可方便控制机构实现步行与滚动。本发明可用于特种变形移动机器人的设计,利用机构两种运动模式,实现复杂地面上的移动。进一步地可设计制造特殊的地面侦察机器人。
(以上资讯来源于网络,如有侵权,请联系管理员删除。)
合肥科翔信息技术服务有限责任公司 版权所有 免责声明
地址:安徽省合肥市高新区天元路软件园1号楼210-212室
电话:180-1954-5300 QQ:2501649871
COPYRIGHT © 合肥科翔信息技术服务有限责任公司 ALL RIGHTS RESERVED. 皖ICP备2023003016号-1
技术支持:明图网络